




HC-SR04 – Capteur de Distance à Ultrasons
1500 CFA
Description du Produit :
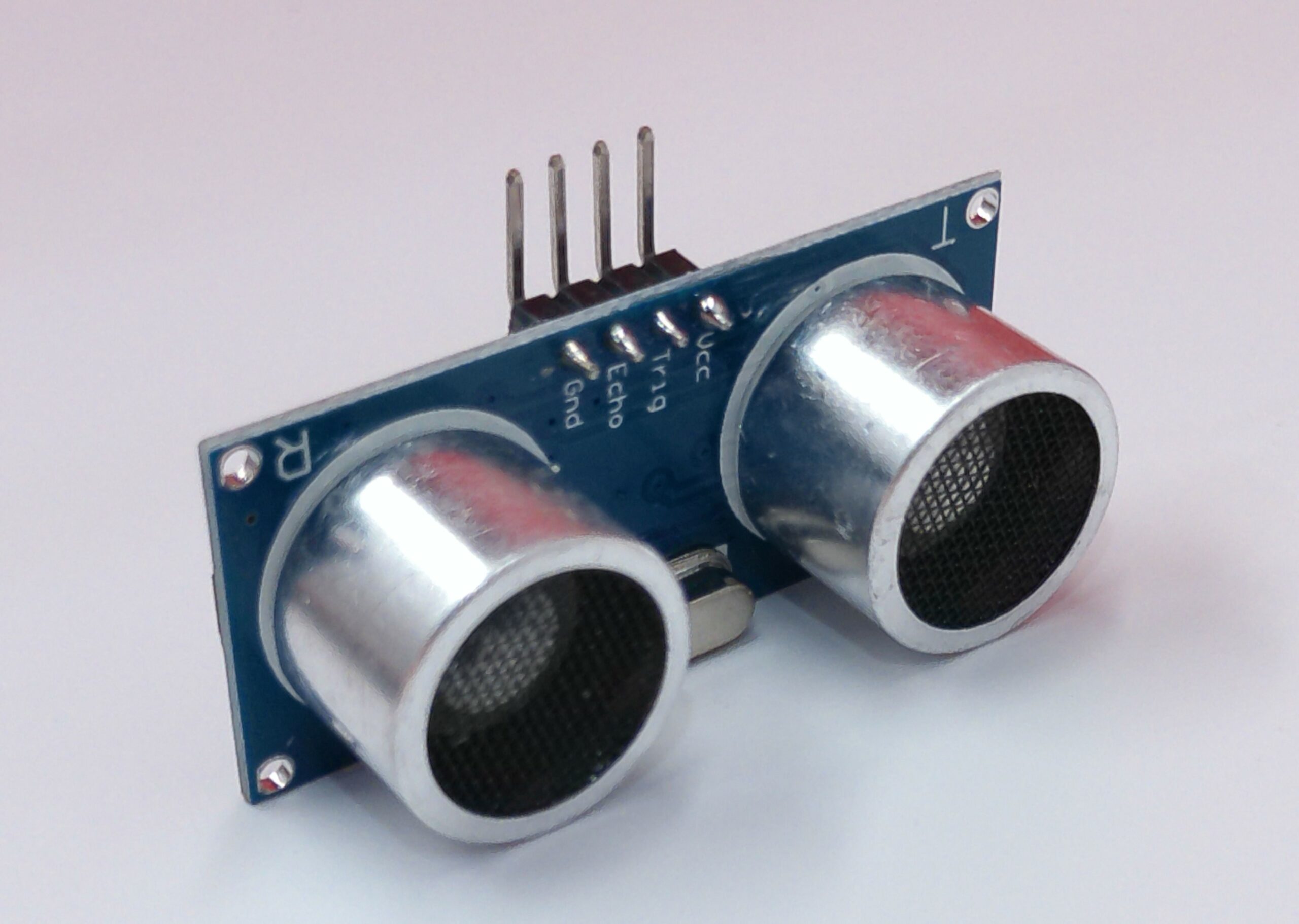
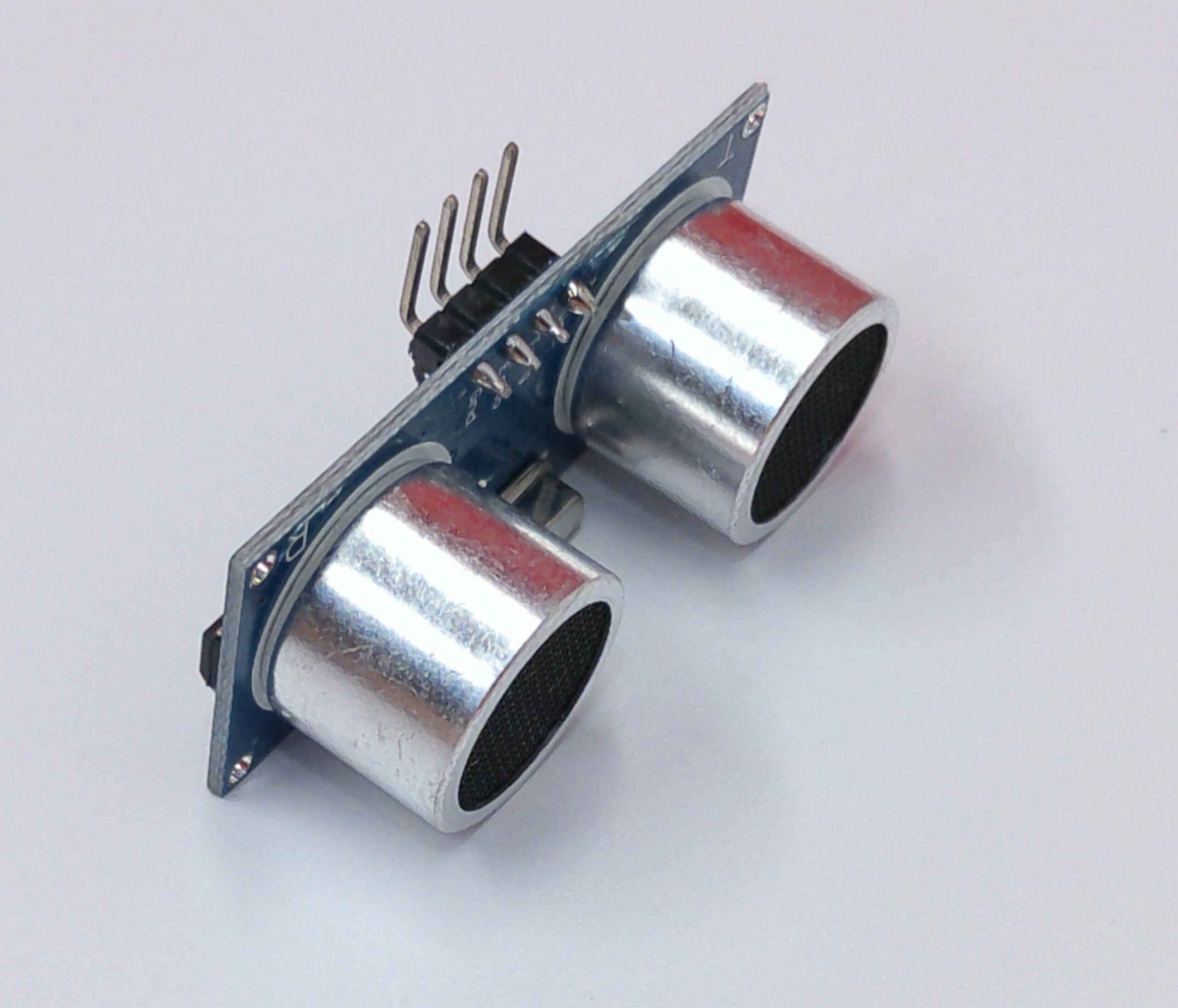
Le HC-SR04 est un capteur de distance à ultrasons économique et facile à utiliser, idéal pour les projets avec des microcontrôleurs tels que Arduino, Raspberry Pi et autres plateformes de développement. Ce capteur utilise des ondes ultrasonores pour mesurer avec précision les distances, et est parfait pour des applications telles que la détection d’obstacles, la mesure de distance et la robotique autonome.
Contenu de l’Emballage :
1 x Capteur de Distance à Ultrasons HC-SR04
- Description
- Avis (0)
- Applications
- Documentation
Description
Mesure de Distance Précise : Le HC-SR04 peut mesurer des distances de 2 cm à 400 cm avec une précision de ±3 mm.
Interface Simple : Le capteur dispose de quatre broches (VCC, Trig, Echo, GND) et peut être facilement connecté à des microcontrôleurs.
Temps de Réponse Rapide : Grâce à son processus de mesure rapide, ce capteur convient également aux applications en temps réel.
Faible Consommation d’Énergie : Avec un courant de fonctionnement de seulement 15 mA, ce capteur est économe en énergie et adapté aux projets alimentés par batterie.
Spécifications Techniques :
Tension de Fonctionnement : 5V DC
Courant de Fonctionnement : 15 mA
Fréquence : 40 kHz
Portée Maximale : 4 mètres
Portée Minimale : 2 cm
Précision de Mesure : ±3 mm
Angle de Détection : environ 15 degrés
Dimensions : 45mm x 20mm x 15mm
Soyez le premier à laisser votre avis sur “HC-SR04 – Capteur de Distance à Ultrasons”
Détection et évitement d’obstacles en robotique
Mesure de distance pour systèmes d’assistance au stationnement
Mesure de niveau dans les réservoirs
Systèmes de sécurité et de surveillance
Connexion et Utilisation :
Le HC-SR04 est simple à utiliser. Connectez la broche VCC à 5V, la broche GND à la masse, la broche Trig à une sortie numérique de votre microcontrôleur et la broche Echo à une entrée numérique. Pour commencer une mesure, envoyez une impulsion courte de 10µs sur la broche Trig. Le capteur enverra alors une impulsion ultrasonore et mesurera le temps nécessaire pour que l’écho revienne. Ce temps est utilisé pour calculer la distance.
Le code C/C++
#define TRIG_PIN 9
#define ECHO_PIN 10
void setup() {
Serial.begin(9600); // Démarrer la communication série
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
}
void loop() {
long duration, distance;
// Envoyer l’impulsion de déclenchement
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// Mesurer la durée de l’écho
duration = pulseIn(ECHO_PIN, HIGH);
// Calculer la distance
distance = (duration / 2) / 29.1;
// Afficher le résultat
Serial.print(« Distance : « );
Serial.print(distance);
Serial.println( » cm »);
delay(1000); // Attendre 1 seconde
}
Avis
Il n’y a pas encore d’avis.